Az általános értelemben vett érzékelő olyan eszköz, amely az egyik fizikai mennyiséget egy másikká alakítja, amely alkalmas feldolgozásra, átvitelre vagy későbbi átalakításra. Általában az első mennyiség fizikai, nem alkalmas közvetlen mérésre (hőmérséklet, sebesség, elmozdulás stb.), a második pedig elektromos vagy optikai jel. A mérőműszerek területén egy rést az érzékelők foglalnak el, amelyek fő eleme egy induktor.
Tartalom
Hogyan működik az induktivitás-érzékelő és hogyan működik
A működési elv szerint az induktív érzékelők aktívak, azaz működésükhöz külső generátor szükséges. Adott frekvenciájú és amplitúdójú jelet ad az induktornak.
A tekercs menetein áthaladó áram mágneses teret hoz létre. Ha egy vezető tárgy kerül a mágneses térbe, a tekercs paraméterei megváltoznak.Már csak ezt a változást kell kijavítani.
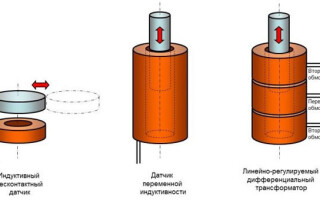
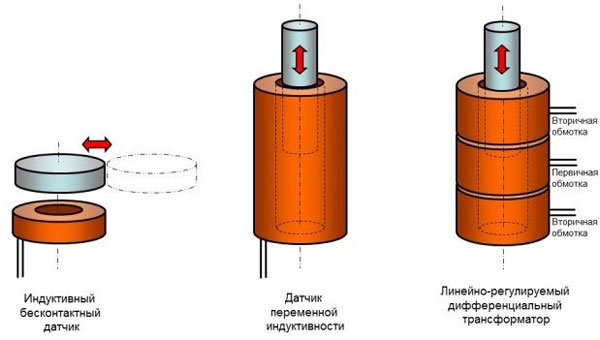
Az egyszerű, érintésmentes érzékelők reagálnak a fémtárgyak megjelenésére a tekercs közeli zónájában. Ez megváltoztatja a tekercs impedanciáját, ezt a változást elektromos jellé kell alakítani, erősíteni és (vagy) összehasonlító áramkör segítségével rögzíteni a küszöb áthaladását.
Más típusú érzékelők reagálnak a tekercs magjaként szolgáló tárgy hosszirányú helyzetében bekövetkezett változásokra. Amikor az objektum helyzete megváltozik, be- vagy kimozdul a tekercsből, ezáltal megváltozik az induktivitása. Ez a változás elektromos jellé alakítható és mérhető. Egy ilyen érzékelő másik változata, amikor egy tárgy kívülről közelíti meg a tekercset. Ez az induktivitás csökkenését okozza a földhatás miatt.
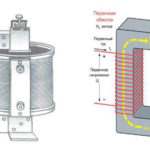
Az induktív eltolásérzékelő másik változata egy lineárisan állítható differenciáltranszformátor (LVDT). Ez egy összetett tekercs, amely a következő sorrendben készül:
- szekunder tekercs 1;
- primer tekercselés;
- szekunder tekercs 2.
A generátor jele az elsődleges tekercsbe kerül. A középső tekercs által létrehozott mágneses mező EMF-et indukál minden másodlagos (transzformátor elve). A mag, amikor mozog, megváltoztatja a tekercsek közötti kölcsönös kapcsolatot, megváltoztatva az elektromotoros erőt az egyes tekercsekben. Ezt a változást a mérőáramkör rögzítheti. Mivel a mag hossza kisebb, mint a kompozit tekercs teljes hossza, a tárgy helyzete egyértelműen meghatározható a szekunder tekercsek EMF-arányával.
Ugyanezen az elven - a tekercsek közötti induktív csatolás megváltoztatásával - egy fordulatérzékelő épül.Két koaxiális tekercsből áll. A jel az egyik tekercsre kerül, a második EMF a kölcsönös forgási szögtől függ.
A működési elvből kitűnik, hogy az induktív érzékelők kiviteltől függetlenül érintésmentesek. Távolról dolgoznak, és nincs szükségük közvetlen érintkezésre a vezérelt tárggyal.
Az induktív érzékelők előnyei és hátrányai
Az induktív típusú érzékelők előnyei elsősorban:
- tervezési megbízhatóság;
- érintkező kapcsolatok hiánya;
- nagy kimeneti teljesítmény, amely csökkenti a zaj hatását és egyszerűsíti a vezérlő áramkört;
- nagy érzékenység;
- az ipari frekvenciájú váltakozó feszültségű forrásokból történő munkavégzés képessége.
Az induktív típusú érzékelők fő hátránya a méretük, súlyuk és a gyártás bonyolultsága. A megadott paraméterekkel rendelkező tekercsekhez speciális felszerelés szükséges. A fő oszcillátorból érkező jel amplitúdójának pontos fenntartásának szükségessége szintén mínusznak számít. Ha megváltozik, az érzékenységi terület is megváltozik. Mivel az érzékelők csak váltakozó árammal működnek, az amplitúdó fenntartása bizonyos technikai problémává válik. Közvetlenül (vagy leléptető transzformátoron keresztül) nem lehet majd háztartási vagy ipari hálózatra csatlakoztatni az érzékelőt - ebben az amplitúdó vagy frekvencia feszültségingadozása normál üzemmódban akár a 10%-ot is elérheti, ami elfogadhatatlanná teszi a mérési pontosságot .
A mérési pontosságot a következők is befolyásolhatják:
- harmadik féltől származó mágneses mezők (az érzékelő árnyékolása a működési elve alapján lehetetlen);
- harmadik féltől származó EMF hangszedők a táp- és mérőkábelekben;
- gyártási hibák;
- érzékelő karakterisztikus hiba;
- holtjátékok vagy deformációk az érzékelő felszerelési helyén, amelyek nem befolyásolják az általános teljesítményt;
- a pontosság függése a hőmérséklettől (a tekercshuzal paraméterei megváltoznak, beleértve az ellenállását is).
Az induktivitás-érzékelők képtelenek reagálni a dielektromos tárgyak megjelenésére a mágneses terükben, az előnyöknek és a hátrányoknak egyaránt betudható. Ez egyrészt korlátozza alkalmazási körüket. Másrészt érzéketlenné teszi a szennyeződés, zsír, homok stb. jelenlétét a megfigyelt tárgyakon.
Az induktív érzékelők működésének hiányosságainak és lehetséges korlátainak ismerete lehetővé teszi azok előnyeinek ésszerű kihasználását.
Az induktív érzékelők köre
Induktív közelségérzékelőket gyakran használnak végálláskapcsolóként. Az ilyen eszközök széles körben elterjedtek:
- biztonsági rendszerekben, mint érzékelők az ablakok és ajtók jogosulatlan kinyitásához;
- telemechanikai rendszerekben az egységek és mechanizmusok végső helyzetének érzékelőjeként;
- a mindennapi életben az ajtók, redőnyök zárt helyzetének jelzésére szolgáló sémákban;
- tárgyak megszámlálásához (például a szállítószalag mentén történő mozgáshoz);
- a fogaskerekek forgási sebességének meghatározása (az érzékelő mellett elhaladó minden egyes fog impulzust hoz létre);
- más helyzetekben.

A szögjeladók segítségével meghatározható a tengelyek, fogaskerekek és egyéb forgó alkatrészek elfordulási szöge, valamint abszolútérték-jeladók. Ezenkívül az ilyen eszközök szerszámgépekben és roboteszközökben használhatók lineáris helyzetérzékelőkkel együtt. Ahol pontosan tudnia kell a mechanizmusok csomópontjainak helyzetét.
Gyakorlati példák induktív érzékelők megvalósítására
A gyakorlatban az induktív érzékelők kialakítása többféleképpen valósítható meg. A legegyszerűbb kivitelezés és beépítés egy kétvezetékes egyszenzorra vonatkozik, amely figyeli a fémtárgyak jelenlétét az érzékenységi zónájában. Az ilyen eszközöket gyakran E-alakú mag alapján készítik, de ez nem alapvető szempont. Egy ilyen megvalósítást könnyebb legyártani.
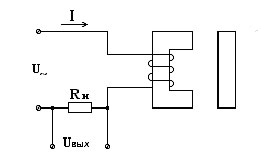
Amikor a tekercs ellenállása megváltozik, az áramkörben lévő áram és a terhelés feszültségesése megváltozik. Ezeket a változtatásokat el lehet követni. A probléma az, hogy a terhelési ellenállás kritikussá válik. Ha túl nagy, akkor az áram változása egy fémtárgy megjelenésekor viszonylag kicsi lesz. Ez csökkenti a rendszer érzékenységét és zajvédelmét. Ha kicsi, akkor az áramkörben nagy lesz az áram, ellenállóbb érzékelőre lesz szükség.
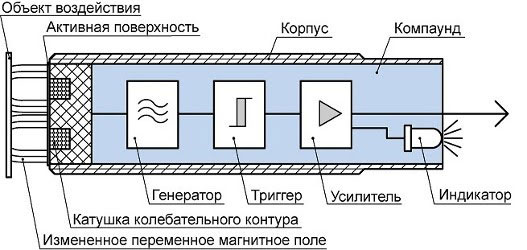
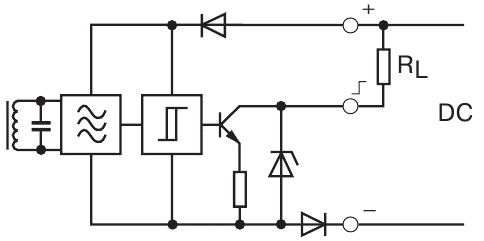
Ezért vannak olyan kialakítások, amelyekben a mérőáramkör az érzékelőházba van beépítve. A generátor impulzusokat állít elő, amelyek táplálják az induktort. Ha elér egy bizonyos szintet, a trigger aktiválódik, és 0-ról 1-re vált, vagy fordítva. A puffererősítő felerősíti a jelet teljesítmény és (vagy) feszültség tekintetében, világítja (kioltja) a LED-et, és diszkrét jelet ad ki a külső áramkörbe.
A kimeneti jel a következőképpen alakítható ki:
- elektromágneses, ill szilárdtest relé – nulla vagy egy feszültségszint;
- "száraz érintkezés" elektromágneses relé;
- nyitott gyűjtő tranzisztor (n-p-n vagy p-n-p szerkezetek).
Ebben az esetben három vezeték szükséges az érzékelő csatlakoztatásához:
- étel;
- közös vezeték (0 volt);
- jelvezeték.
Az ilyen érzékelők egyenfeszültségről is táplálhatók. Az induktivitás impulzusait egy belső generátor hozza létre.
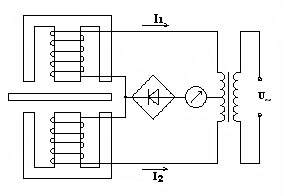
Differenciál-jeladókat használnak a helyzet figyelésére. Ha a vezérelt objektum szimmetrikus mindkét tekercshez képest, akkor a rajtuk áthaladó áram azonos. Ha bármely tekercs a mező felé tolódik, egyensúlyhiány lép fel, a teljes áram megszűnik nullával egyenlő lenni, amit a skála közepén lévő nyíllal ellátott jelzővel rögzíthetünk. A mutató segítségével meghatározható az eltolódás mértéke és iránya egyaránt. A mutatóeszköz helyett használhat egy vezérlési sémát, amely a helyzet változásáról szóló információ megérkezésekor jelzést ad ki, intézkedik az objektum igazításáról, módosítja a technológiai folyamatot stb.

A lineárisan állítható differenciáltranszformátorok elve alapján készült szenzorok komplett szerkezetek formájában készülnek, melyek primer és szekunder tekercsekkel ellátott keret és egy belül mozgó rúd (lehet rugós terhelés). A vezetékeket kivezetik, hogy jelet küldjenek a generátorból, és eltávolítsák az EMF-et a szekunder tekercsekből. Egy irányított tárgy mechanikusan rögzíthető a rúdra. Dielektrikumból is készülhet - csak a szár helyzete számít a mérésnél.
Bizonyos eredendő hiányosságok ellenére az induktív érzékelő számos olyan területet lezár, amelyek az űrben lévő tárgyak érintésmentes észleléséhez kapcsolódnak.A technológia folyamatos fejlődése ellenére az ilyen típusú készülékek belátható időn belül nem hagyják el a mérőeszközök piacát, mert működése a fizika alapvető törvényein alapul.
Hasonló cikkek: